Students: Menno van Dongen | LinkedIn , Johan Lyby Høedt-Rasmussen | LinkedIn and Luc van der Loos | LinkedIn. (2022)
Introduction:
For this SMR period, a project was done for the company Martin Stolze B.V., located in De Lier. Martin Stolze B.V. is a company that supplies automation solutions for potted plant greenhouse companies. Solutions variate from moving potted plants into the greenhouse on conveyor belts to automatically filling potted plants with soil. Martin Stolze B.V. is part of Kind Technologies B.V. that owns a few other companies that also work in greenhouse automation.
The goal for this project was to make a system that can pick up kalanchoes (type of potted plant) from a conveyor belt, put them into a tray using a robot and check their placement with a vision system. The system was designed for the company SV.CO. Currently, only three employees at SV.CO put kalanchoes into trays, which is too few compared with the goals of the company. Therefore, SV.CO wanted a packing system that can fill Kalanchoes without a protection cover.
The challenges:
The main challenges of the assignment were:
- Not damaging the leaves during placement.
- Distance between Kalanchoes is different on conveyor belt compared to the tray.
- Detection of misplaced or missing Kalanchoes in a tray.
- Detecting the color of the Kalanchoes.
The solution:
General overview:
The system consists of five modules:
- Module 1 | Collector: Collects five kalanchoes and places them on the correct centre-to-centre distance.
- Module 2 | Robot: Picks up five kalanchoes and puts them in the tray at the plant separator.
- Module 3 | Plant separator: Makes sure that the leaves are protected when other rows of kalanchoes are placed.
- Module 4 | Vision cell: Checks for misplaced or missing young kalanchoes for the older kalanchoes it also checks the color.
- Module 5 | Human Machine Interface: Is used to control- and get an overview of the system
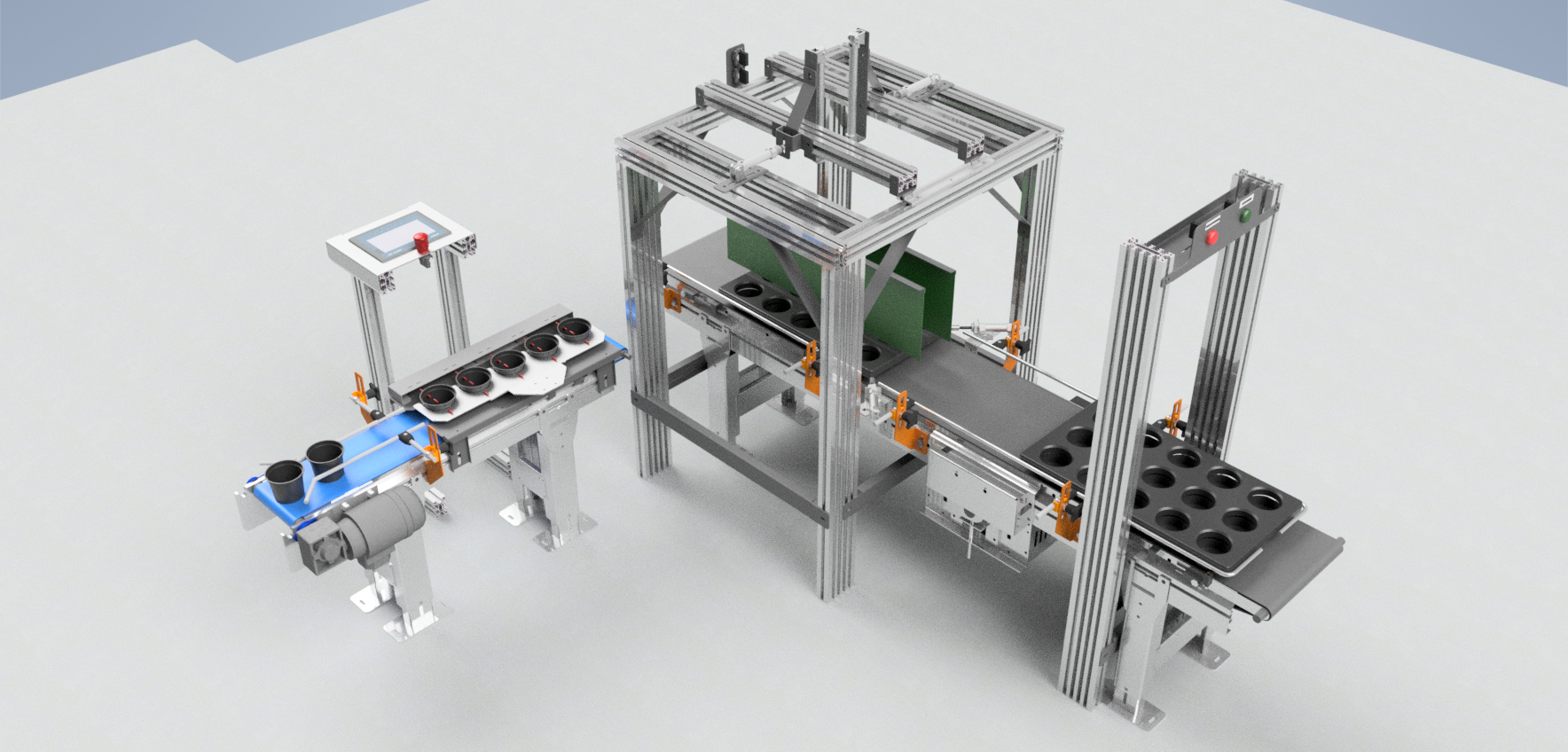
Image 1: Overview of the system
Collector:
The collector is attached to the end of the conveyor belt, where the kalanchoes will be stopped mechanically at a correct distance. In Image 2, the mechanical flippers and the sensors that detect if there are five Kalanchoes ready to be picked-up is shown.

Image 2: Potted plant collector
Robot:
The robot picks up the kalanchoes with the end-of-arm-tool (Image 3) and places them in the tray. The end-of-arm-tool can pick up five kalanchoes at a time. The tray has 15 holes (3×5), so the robot needs to place three rows of plants for it to be filled.

Image 3: Robot end-of-arm-tool
Plant Separator:
The plant separator consists of four pneumatic pistons and two screens. These screens drop down to push the leaves away from the holes. This way, the leaves of the already placed plants will not get crushed when the next row is being placed. Each screen has a horizontal and a vertical piston. After one row is placed, the screen drops down (vertical movement) and moves the leaves back (horizontal movement). In Image 4, the pistons and the guider rails are shown. In Image 5, the screen is down and moves the leaves back.
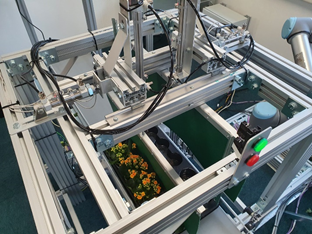
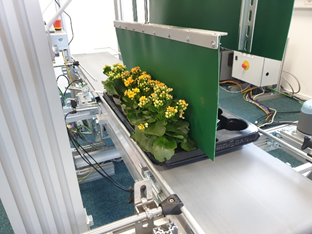
Image 4: Plant separator from above. Image 5: Plant separator from the side.
Vision cell:
After the tray is filled, it moves on to the vision cell where it is checked for correct placements. It will be checked for empty holes, misplaced kalanchoes and for color of the older plants. If a kalanchoe is misplaced or a hole is empty, the system will recognize it and notify the user by lighting up the red LED (Image 7). If the tray is filled correctly a green LED will light up (Image 7). In image 8 is shown what the vision program output is. A correctly placed kalanchoe is marked with a green square. An empty hole or a misplaced Kalanchoe will be marked with a red square.


Image 6: Example of a misplacement tray. Image 7: Example of a well placement tray.

Image 8: Vision program result.
Human Machine Interface:
On the Human Machine Interface (HMI) information about the system will be displayed. This includes for example the status of the system, system statistics and the detected placements of the vision system. For this system it is possible to set what color flower needs to be placed where. The PLC will check the input of the vision system and determine if the flowers are placed in the correct position in the tray.
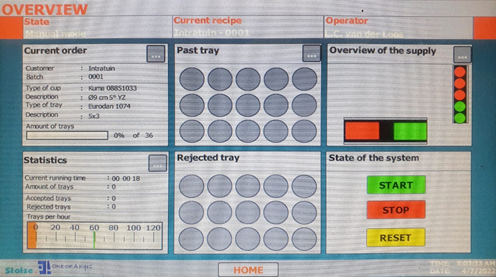
Image 9: HMI
Main decisions:
At the start of the project we wanted to add two more modules. One to take the kalanchoes from the product carriers and a buffer zone where the plants would be sorted acoording to their characteristics. Because of the limited time and delayed with deliveries, we made the decision not to add those two modules. Also, we decided to place five kalanchoes at a time to reduce the cycle time compared to placing three kalanchoes at a time. Also, the robot is not very quick. This also reduces the cycle time.
Conclusion:
As a group, we are very satisfied with our achievements in this period of seven weeks with only three students. Also, we are happy with the support from Martin Stolze B.V.. We had a lot of freedom building this system and had lots of resources available at the company.
Afterthoughts:
After testing it was concluded that on one side of the separator system the leaves were being damaged. The test results will be considered in our follow-up project, which will be carried out at Martin Stolze B.V. as well.